Wij gebruiken cookies om uw ervaring beter te maken. Om te voldoen aan de cookie wetgeving, vragen we uw toestemming om de cookies te plaatsen. Meer informatie.







Seeed Pixy 2 CMUcam5 Smart Vision Sensor

Pixy2 is de tweede versie van Pixy. Het is sneller, kleiner en beter in staat dan de originele Pixy, en voegt lijnvolgsysteem / volgalgoritmen toe, evenals andere functies.
Niet op voorraad
Bestel als pre-order en ontvang het artikel wanneer het weer op voorraad is.
Seeed Pixy 2 CMUcam5 Smart Vision Sensor
Pixy2 is de tweede versie van Pixy.
Het is sneller, kleiner en beter in staat dan de originele Pixy, en voegt lijnvolgsysteem / volgalgoritmen toe, evenals andere functies.
Dit is wat we hebben toegevoegd aan Pixy2:
- Pixy2 detecteert lijnen, kruispunten en kleine barcodes, bedoeld voor lijnvolgende robots
- Verbeterde framerate - 60 frames per seconde
- Tracking-algoritmen zijn toegevoegd aan objectdetectie op basis van kleuren Verbeterde en vereenvoudigde bibliotheken voor Arduino, Raspberry Pi en andere controllers
- Geïntegreerde lichtbron
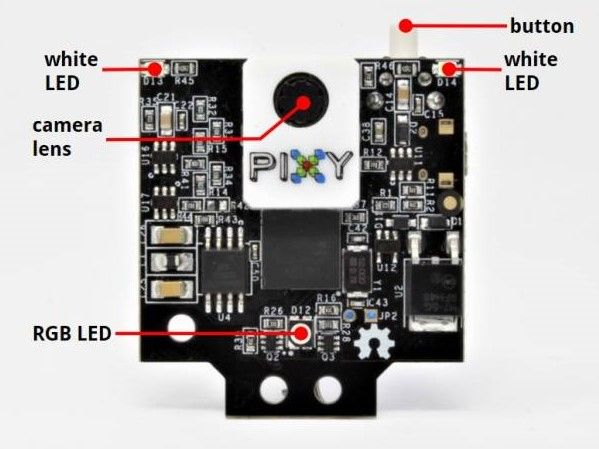
De Charmed Labs Pixy 2 CMUcam5-beeldsensor is kleiner, sneller en capabeler dan de originele Pixy. Net als zijn voorganger kan Pixy2 leren om objecten die je hem leert te detecteren, gewoon door op een knop te drukken. Daarnaast heeft Pixy2 nieuwe algoritmen die lijnen detecteren en volgen voor gebruik met lijnvolgende robots. De nieuwe algoritmen kunnen ook kruispunten en "verkeersborden" detecteren. De verkeersborden kunnen uw robot vertellen wat hij moet doen, zoals links afslaan, rechts afslaan, vertragen, enz.

Als u wilt dat uw robot een taak uitvoert, zoals het oppakken van een voorwerp, het achtervolgen van een bal, het lokaliseren van een laadstation, enz., En u wilt een enkele sensor om al deze taken te vervullen, dan is zicht uw sensor. Vision (beeld) sensoren zijn handig omdat ze zo flexibel zijn. Met het juiste algoritme kan een beeldsensor praktisch alles detecteren of detecteren. Maar er zijn twee nadelen aan beeldsensoren: 1) ze voeren veel gegevens uit, tientallen megabytes per seconde, en 2) het verwerken van deze hoeveelheid gegevens kan veel processoren overweldigen. En als de processor de gegevens kan bijhouden, is een groot deel van zijn verwerkingskracht niet beschikbaar voor andere taken.

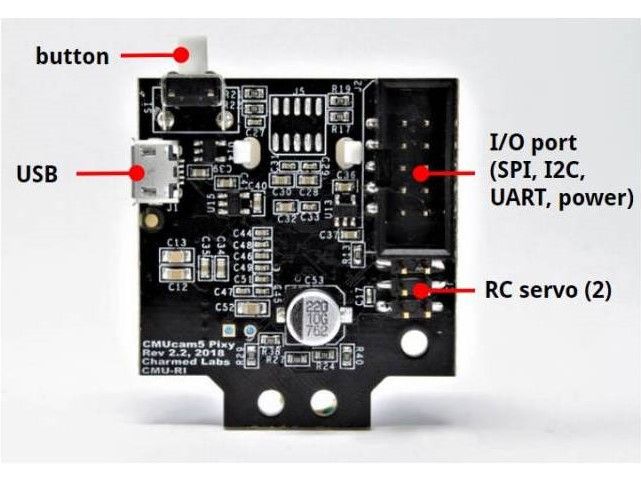
Pixy2 lost deze problemen op door een krachtige speciale processor te koppelen aan de beeldsensor. Pixy2 verwerkt afbeeldingen van de beeldsensor en stuurt alleen de nuttige informatie (bijv. Paarse dinosaurus gedetecteerd op x = 54, y = 103) naar je microcontroller. En dat doet hij met beeldsnelheid (60 Hz). De informatie is beschikbaar via een van de verschillende interfaces: UART serieel, SPI, I2C, USB of digitale / analoge output. Dus je Arduino of andere microcontroller kan gemakkelijk met Pixy2 praten en heeft nog steeds voldoende CPU beschikbaar voor andere taken.
60 frames per seconde
Wat betekent "60 frames per seconde"? Kortom, Pixy2 is snel. Pixy2 verwerkt elke 1/60 seconde een volledig beeldframe (16,7 milliseconden). Dit betekent dat u elke 16,7 ms een volledige update krijgt van de posities van alle gedetecteerde objecten. In dit tempo is het volgen van het pad van de vallende / stuiterende bal mogelijk. (Een bal met een snelheid van 40 mph beweegt minder dan een voet in 16,7 ms.) Als uw robot lijnvolging uitvoert, zal uw robot doorgaans een kleine fractie van een inch tussen frames verplaatsen.

Paarse dinosaurussen (en andere dingen)
Pixy2 gebruikt een op kleur gebaseerd filteralgoritme om objecten te detecteren die het Color Connected Components (CCC) -algoritme worden genoemd. Kleurgebaseerde filtermethoden zijn populair omdat ze snel, efficiënt en relatief robuust zijn. De meesten van ons zijn bekend met RGB (rood, groen en blauw) om kleuren weer te geven. Pixy2 berekent de kleur (tint) en verzadiging van elke RGB-pixel van de beeldsensor en gebruikt deze als de primaire filterparameters. De tint van een object blijft grotendeels ongewijzigd bij veranderingen in belichting en belichting. Veranderingen in belichting en belichting kunnen een frustrerend effect hebben op kleurfilteralgoritmen, waardoor ze breken. Het filteralgoritme van Pixy2 is robuust als het gaat om veranderingen in belichting en belichting.
Zeven kleurensignaturen
Het CCC-algoritme van Pixy2 onthoudt maximaal 7 verschillende kleurensignaturen, wat betekent dat als u 7 verschillende objecten met unieke kleuren heeft, het kleurfilteralgoritme van Pixy2 geen probleem zal hebben om ze te identificeren. Als u er meer dan zeven nodig heeft, kunt u kleurcodes gebruiken (zie hieronder).

PixyMon laat je zien wat Pixy ziet
PixyMon is een applicatie die draait op Windows, MacOs en Linux. Hiermee kun je zien wat Pixy ziet, als onbewerkte of verwerkte video. U kunt er ook uw Pixy mee configureren, de uitvoerpoort instellen en kleurhandtekeningen beheren. PixyMon communiceert met Pixy via een standaard mini-USB-kabel. PixyMon is geweldig voor het debuggen van je applicatie.

Controllerondersteuning
Pixy kan gemakkelijk op veel verschillende controllers worden aangesloten omdat het verschillende interface-opties ondersteunt (UART serieel, SPI, I2C, USB of digitale / analoge output), maar Pixy begon zijn leven te praten met Arduinos. In de afgelopen maanden is ondersteuning toegevoegd voor Arduino Due, Raspberry Pi en BeagleBone Black.
| Artikelnummer | 700600596537 |
|---|---|
| Merk | SeeedStudio |
| EAN | 700600596537 |
| Fabrikantcode | 102991074 |
| Garantie | 2 Jaar |
| Afmetingen | 42 x 38 x 15mm |
| Gewicht | 10g |
| Intern Werkgeheugen (RAM) | 264K bytes / Flash: 2M Bytes |
| Stroomvoorziening | Power consumptie: 140 mA typical / Power input: UXB input (5V) of unregulated input (6V tot 10V) |
| Features Overig |
|
| Compatibiliteit |
|
| Handleidingen |
|
| Standaard Meegeleverd |
|
| Short Description | Pixy2 is de tweede versie van Pixy. |
Reviews
Schrijf uw eigen review
Vragen over dit product
Gerelateerde producten